科研項目:
*中國大洋礦產資源研究開發“十五”深海資源研究開發專項《深海采礦系統監控、動力配置技術設計》研究開發子項目。
局部剪切階段(開始塑性變形):當履帶對海泥的壓載大于臨界荷載而小于海泥的極限承載力時,海泥出現塑性變形,隨著壓力的增大,塑性變形區逐漸擴大。如圖1示,a點與b點之間。
完全破壞階段(塑性變形區連成連續的滑動面):當壓力繼續增大,超過海泥的極限承載力,塑性變形區連成連續的滑動面,海泥被擠出來。如圖1示,超過“b”點后,應力增加一微小量,應變便顯著增加。這種顯著增加的應變,構成塑性流動。塑性流動以前的狀態,通常稱為塑性平衡狀態。從塑性平衡狀態轉變為塑性流動狀態,表示物質被破壞。
由以上分析可知,深海機器人應該工作在局部剪切階段才能較好的利用海泥提供的牽引力行走。
(2)履帶-海泥相互作用
當驅動履帶,在接觸面的地面上產生剪切作用。如圖2所示,為了預測車輛的牽引力和滑轉率,需要了解地面的剪切應力和剪切變形之間的關系。這個關系可由剪切試驗來確定。在剪切試驗中可用剪切板代替履帶刺的剪切作用。
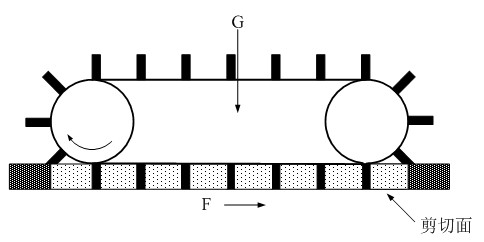
圖2 履帶的剪切作用
經測定我國礦區內的海泥剪切特性存在明顯大于0的殘余剪切力。Wong提出以下公式來表示改型土壤:
 (1)
(1)式中,k-水平剪切變形模數,m;j-剪切位移,m。Kr-殘余剪切應力與最大剪切應力比τr/τmax。















共0條 [查看全部] 網友評論